 手機版|
手機版|

 關注公眾號|
關注公眾號|


 下載手機APP
下載手機APP摘 要:現有索道輪體測速裝置采用齒輪嚙合傳遞轉速給測速儀器實現測量,其測量精度容易受線路載荷、電機 運行狀態以及輪體尺寸和加工精度等多方面因素影響,而且測速裝置結構形式單一,不具備通用性,緩沖減振效 果不佳。研究設計一種多桿式可調節緩沖測速裝置,通過工業氣彈簧和滑動支座的組合運動,實現測速儀器0~31° 角度可調,從而適應不同工況安裝需求,同時工業氣彈簧實現主動調節和緩沖減振,消除了測速過程中的沖擊, 提高了測量精準性。
關鍵詞:索道;多桿式;可調節;測速;緩沖
Abstract: The existing ropeway wheel speed measuring device adopts gear meshing to transmit rotating speed to the speed measuring instrument to realize measurement, and the measurement accuracy is easily influenced by various factors such as route load, motor running state, wheel size, machining accuracy and the like; moreover, the speed measurement device has a single structural form, does not have universality, and has poor buffering and vibration damping effects. A multi-rod adjustable buffer speed measurement device is researched and designed. Through the combined movement of industrial gas spring and sliding support, the 0 to 31° angle of the speed measurement instrument can be adjusted to meet the installation requirements of different working conditions. At the same time, the industrial gas spring realizes active adjustment and buffer vibration reduction, eliminates the impact in the speed measurement process, and improves the measurement accuracy.
Keywords: ropeway; multi-rod type; adjustable; speed measurement; buffer
0 引言
隨著科學技術的發展,如今測速的方式多種多樣,精度也越來越高。最常用的方式有激光測速、電子元器件感應測速等。在索道這種要求實用性的特種設備上,為了保證測速的可靠性,一般采用機械式測量方法,主要是在驅動輪或迂回輪上增加齒圈,通過齒輪嚙合傳遞速度給光電傳感器或測速電機實現速度的獲取。實踐證明這種測速方式有一定實用性,但是如果線路載荷波動較大,驅動電機的運行狀態不穩定,或輪體邊緣加工精度低都會造成測速的波動和不穩定性,偶爾會出現掉轉、檢測不到等情況,且由于測試裝置本身的結構限制,安裝可替代性差,無法實現通用化,存在一定的局限性。
針對目前測速裝置的不足,本文提出了一種可調節式、帶緩沖裝置的設計理念,能夠實現線路波動、電機運行不穩定等問題的動態響應,從而保證測速的精準性。新型測速裝置調節范圍較大,能夠實現不同直徑輪體的安裝,從而實現通用化測速,適用范圍廣。
1 可調節測速緩沖裝置設計與參數計算
可調節測速緩沖裝置的設計要實現兩個重要功能,一是測速行程可調節,本文通過桿件機構的移動組合實現位移行程的放大,從而滿足不同索距和不同直徑輪體的安裝測速需求。二是測速過程中的緩沖減振性,由于索道運行過程中的線路波動會使輪體產生徑向不平穩,從而直接導致測速接觸部位交互受力,加劇磨損,實際測速中會存在丟轉現象,一旦遇到惡劣天氣或線路載荷波動較大,測速裝置的精準性和使用壽命大幅縮減,因此新型測速裝置的設計需要能夠動態響應輪體的徑向載荷變化,并作出主動的跟隨調節達到緩沖效果,這樣才能精準獲取速度大小,提高測速裝置的精確性和耐用性。
1.1 機構設計
對于桿系來說,如果桿件太多會存在一定的穩定性和強度問題,所以通過滑塊的移動和可伸縮桿的配合,組成了一個類五桿設計。一方面解決了桿件緊湊問題,增大位移行程,另一方面通過可伸縮桿的的自身特性增加緩沖效果,保證測速不穩定的動態響應調節。主要機 構原理如圖 1 所示。

圖 1 機構簡圖
上述機構由五個桿件組成,其中桿件 3 為滑塊,可移動長度為 BB ’ 的長度,桿件4 和 5 組成了一個可伸縮桿,在本文的研究中選用一個帶緩沖的工業氣彈簧替 代。主要的桿件參數包括:桿件1 長度 OA =150 mm,與Y軸夾角 θ =39°;桿件2 水平方向長度 OB x =208 mm;豎直方向長度 OB y =14 mm;滑塊在 X 軸方向可滑動調節范圍為BB ’ =33 mm。伸縮桿(工業氣彈簧)型 號 GS-8-60-AE-80,最小安裝距離為 116 mm,最大安裝 距離 176 mm,行程 60 mm。工業氣彈簧運行環境溫度 為- 40℃~ 200℃,其內部是氮氣室和油室的結合,安裝時通過調節閥門釋放氮氣可以控制活塞桿的行程,內部充油區在行程末端加裝有阻尼,實際受到沖擊時實現緩沖作用。
1.2 參數計算
由于滑塊和可伸縮桿的雙重作用,五桿機構中桿件 2 位置存在多個可能性,通過分析最大和最小組合運動位置,通過二維作圖方式可以計算出可調節測速緩沖裝 置的件 2 調節范圍為 0 ~ 31° 1)當滑塊和氣彈簧組合處于 OAB 位置:滑塊在最遠距離, OB最長,氣彈簧 AB縮到最短安裝距離, 桿件狀態如圖2 所示,對應的桿件2 與 X 軸夾角為 ∠ BOX ,可調節量最小。
2)當滑塊和氣彈簧組合處于 OAB ˊ 位置:滑塊在最短距離, OB ˊ最短,氣彈簧 AB 伸到最長安裝距離, 桿件狀態如圖2 所示,對應的桿件2 與 X 軸夾角為- ∠ B ˊ OX ,可調節量最大。
綜合分析以上兩個桿件極限組合狀態,最終桿 件 2 的旋轉最大夾角為 ∠ BOX 和∠ B ˊ OX 之和,即 31°。在實際應用中可將測量速度的儀器安裝在桿件2 上,其測速可調節角度范圍為0 ~ 31°,可適應不同輪體直徑和不同安裝工況的測速,滿足實際需求。
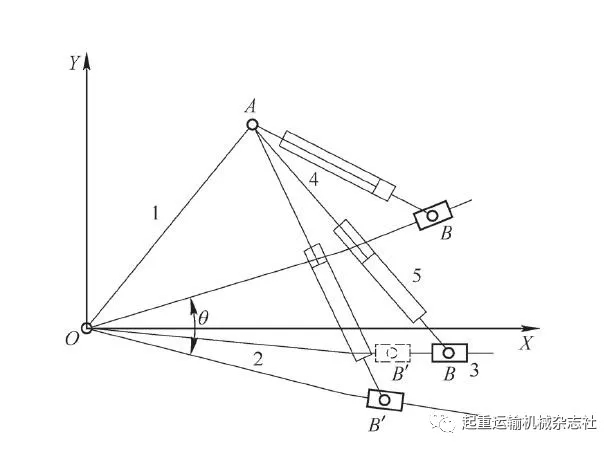
圖2 機構軌跡圖
2 可調節測速緩沖裝置結構設計
從機構原理設計轉化到結構設計部分,需要考慮機構的靈活性和可靠性,實體結構的輕量化和緊湊,除此之外還要考慮實際的安裝和調試,方便快捷才具有實用 性。通過多次優化設計改進,裝置結構如圖 3 所示,主要包括固定吊架、移動桿、轉動桿、工業氣彈簧以及測速系統等。該測量裝置能夠實現豎直方向的位移調節和水平方向的轉動調節,還能起到緩沖作用。
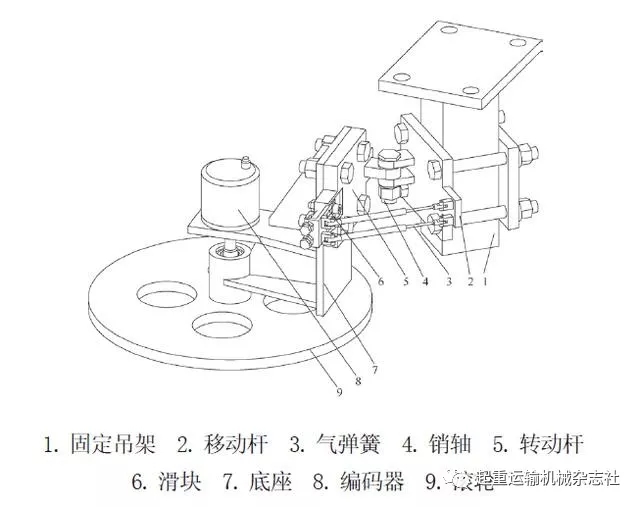
圖 3 可調節測速緩沖裝置結構圖
1)豎直位移可調:固定吊架主要通過螺栓安裝在 輪體上,移動桿通過四個螺栓連接在固定吊架上,豎直 可調,考慮到索道輪體邊緣的厚度一般為130 mm左右, 所以可移動距離設計為 150 mm。
2)水平旋轉可調:轉動桿是個組合件,通過滑塊 嵌套在桿件的滑槽內,實現滑動可調節和定位限制,確 定組合位置后一般采用螺栓鎖死固定。移動桿和轉動桿間通過銷軸連接,為保證轉動平穩不卡死,在移動桿銷 軸孔內安裝了軸承套,在轉動桿銷軸孔內安裝了帶翻邊 的軸承套,抵消測速儀器自重形成的彎矩,從而保證銷 軸轉動的平順性。
3)測速系統:整個測速系統安裝在轉動桿上,根 據實際安裝需求和工況,確定滑塊位置和工業氣彈簧的 伸縮行程。測速系統主要包括了編碼器、安裝座、滾輪 以及其他傳動軸等。滾輪一般采用高硬度橡膠材質,摩 擦因數大,且耐磨,從而保證與輪體接觸的平穩可靠。
4)緩沖和動態響應:整個工業氣彈簧耐低溫和高溫, 通過鉸接形式與移動桿和轉動桿的銷孔連接,形成二力 桿,其本身的伸縮行程放大了整個測速裝置的可調節范 圍。實際安裝中,工業氣彈簧通過調節氣壓實現活塞桿 的初始安裝定位,由于其內部油腔緩沖結構,能夠瞬時 響應測速輪體的徑向波動,從而達到緩沖減振效果。
3 結論
本文所述多桿式可調節索道測速緩沖裝置設計, 一方面實現了測速行程的可調節,豎直方向可實現150 mm 的位移調節,水平方向可實現0 ~ 31°的角度轉 動,滿足了不同工況的測速需求。另一方面,由于氣彈 簧的特殊結構,在實際測速中能夠起到主動微調和緩沖 響應,緩解線路載荷波動以及電機運行不平穩造成的測 量誤差,從而提高測量平穩性和準確性。除此之外,整 個裝置結構緊湊輕巧,對各桿件結構進行了優化和輕量 化外形設計,鉸接位置轉動靈活,實際安裝和拆卸方便 快捷,適用于不同輪徑下的測速安裝需求,具有一定的 普適性和實用性,改進了索道的測速形式。



















